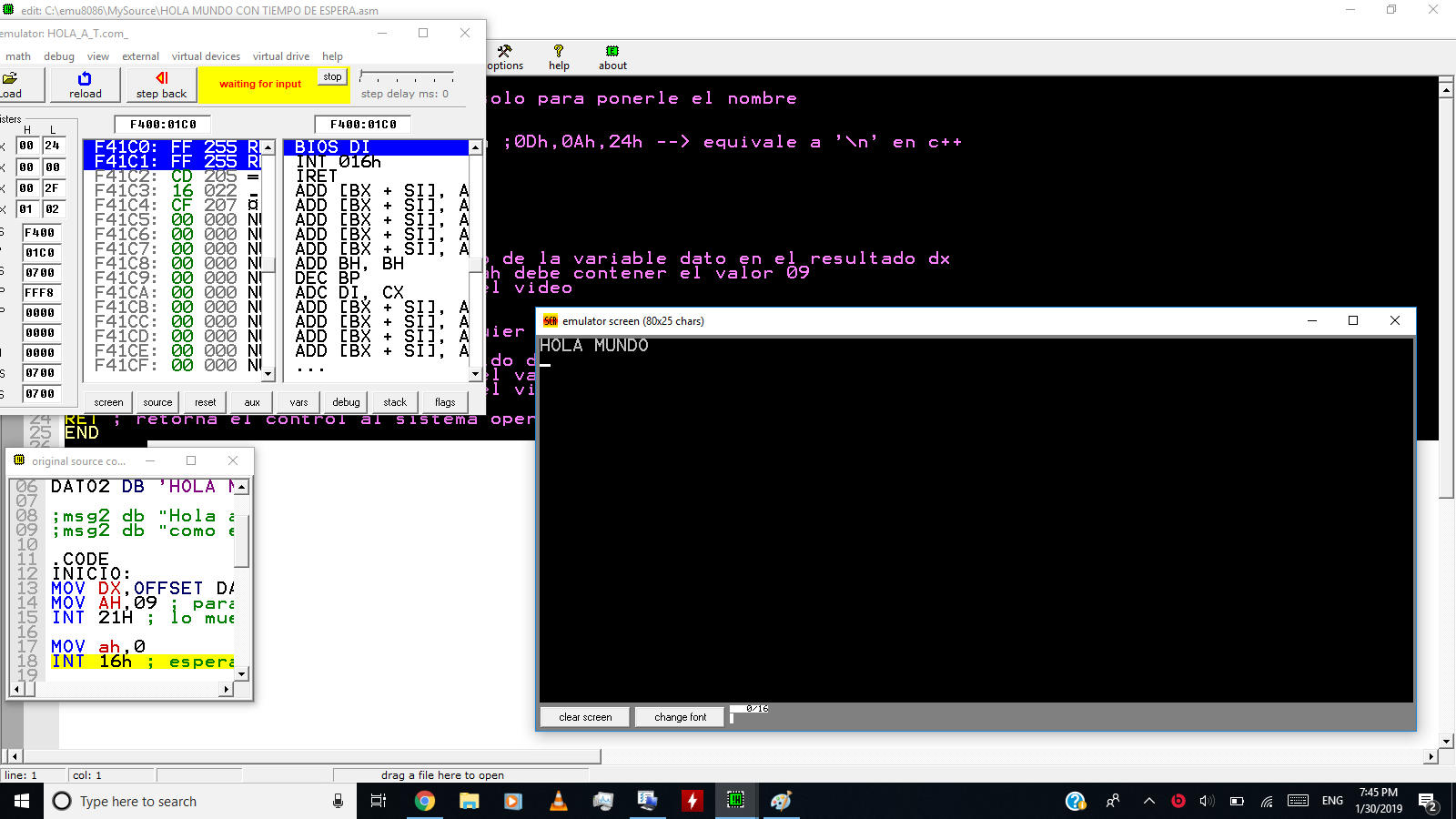
En este ejemplo estará el cursor esperando a que se de clic, aquí el código:
.MODEL tiny
NAME "HOLA A TODOS" ;esta linea es solo para ponerle el nombre
.DATA
DATO DB "HOLA MUNDO", 0Dh, 0Ah, 24h ;0Dh,0Ah,24h --> equivale a '\n' en c++
DATO2 DB 'HOLA MUNDO 2$'
;msg2 db "Hola alumnos"
;msg2 db "como estas"
.CODE
INICIO:
MOV DX,OFFSET DATO ;lee el contenido de la variable dato en el resultado dx
MOV AH,09 ; para imprimir el valor ah debe contener el valor 09
INT 21H ; lo muestra en el puerto del video
MOV ah,0
INT 16h ; esperando presionar cualquier letra equivalente a un get
MOV DX,OFFSET DATO2 ; lee el contenido de la variable dato 2 en el resultado dx
MOV AH,09 ; para imprimir el valor el valor ah debe contener el valor 09
INT 21h ; lo muestra en el puerto del video
RET ; retorna el control al sistema operativo
END
 |
| en esta imagen podemos ver que esta esperando al get |
 |
| ahora esta el segundo |
Ahora le hice una pequeña modificación al código para poder desplegar más de dos mensajes en pantalla, aquí el código:
.MODEL tiny
NAME "HOLA A TODOS" ;esta linea es solo para ponerle el nombre
.DATA
DATO DB "HOLA MUNDO", 0Dh, 0Ah, 24h ;0Dh,0Ah,24h --> equivale a '\n' en c++
DATO2 DB "HOLA MUNDO 2", 0Dh, 0Ah, 24h
DATO3 DB "HOLA DE PARTE DE MAGDIEL RUIZ$"
;msg2 db "Hola alumnos"
;msg2 db "como estas"
.CODE
INICIO:
MOV DX,OFFSET DATO ;lee el contenido de la variable dato en el resultado dx
MOV AH,09 ; para imprimir el valor ah debe contener el valor 09
INT 21H ; lo muestra en el puerto del video
MOV ah,0
INT 16h ; esperando presionar cualquier letra equivalente a un get
MOV DX,OFFSET DATO2 ; lee el contenido de la variable dato 2 en el resultado dx
MOV AH,09 ; para imprimir el valor el valor ah debe contener el valor 09
INT 21h ; lo muestra en el puerto del video
MOV ah,0
INT 16h ; esperando presionar cualquier letra equivalente a un get
MOV DX,OFFSET DATO3 ; lee el contenido de la variable dato 2 en el resultado dx
MOV AH,09 ; para imprimir el valor el valor ah debe contener el valor 09
INT 21h ; lo muestra en el puerto del video
RET ; retorna el control al sistema operativo
END
 |
| Ya cuenta 3 mensajes en pantalla |